Cost-Optimized Autonomous Flight:
NexusV2 Flight Controller
AI-Assisted Navigation for Production-Ready UAV Platforms.
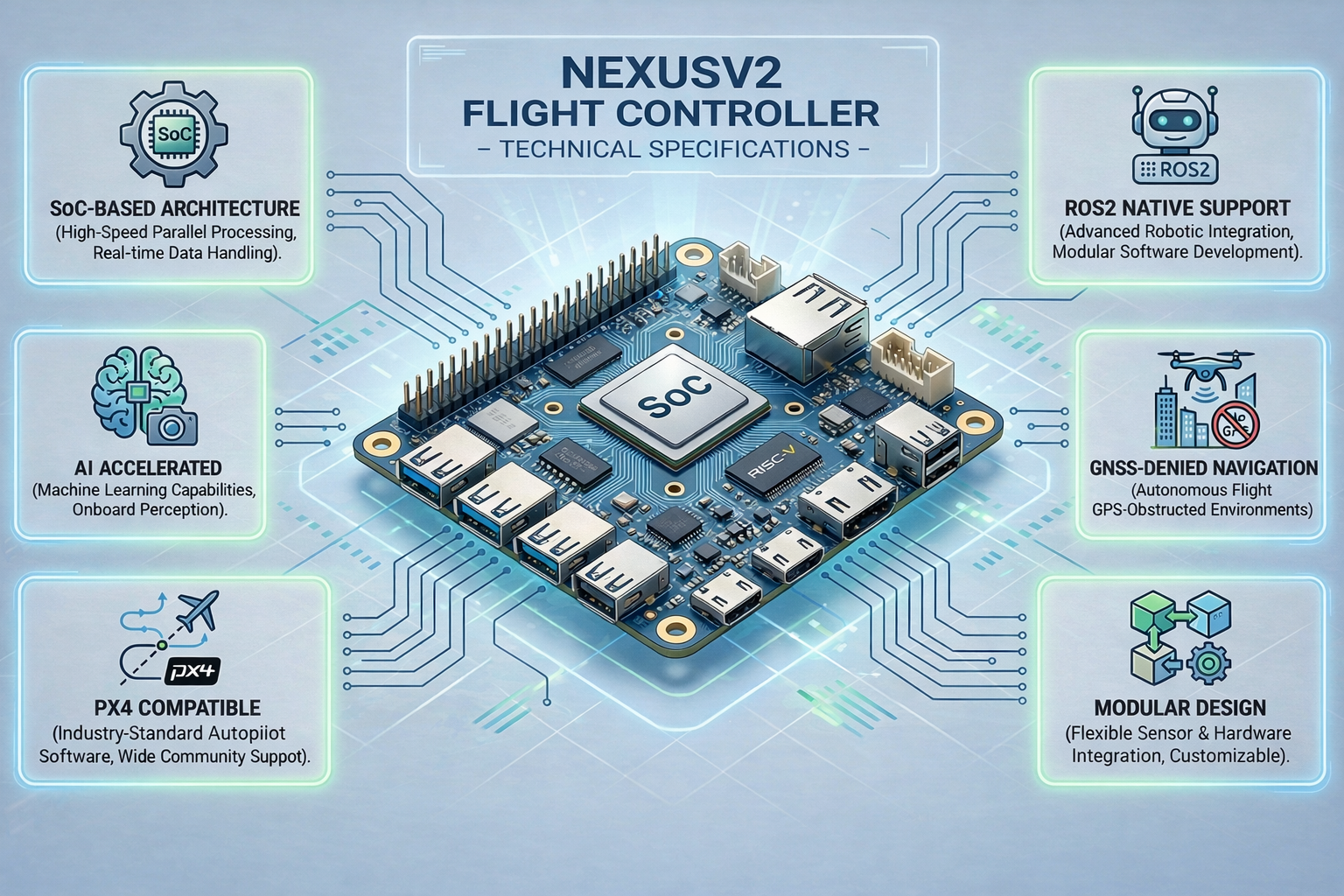
SOC-BASED ARCHITECTURE
High-Speed Parallel Processing, Real-Time Data Handling.
AI ACCELERATED
Onboard Machine Learning & Perception.
GNSS-DENIED NAVIGATION
Autonomous Flight in GPS-Obstructed Environments.
ROS2 NATIVE SUPPORT
Advanced Robotic Integration, Modular Software Development.
PX4 COMPATIBLE
Industry-Standard Autopilot Software, Wide Community Support.
MODULAR DESIGN
Flexible Sensor & Hardware Integration, Customizable.